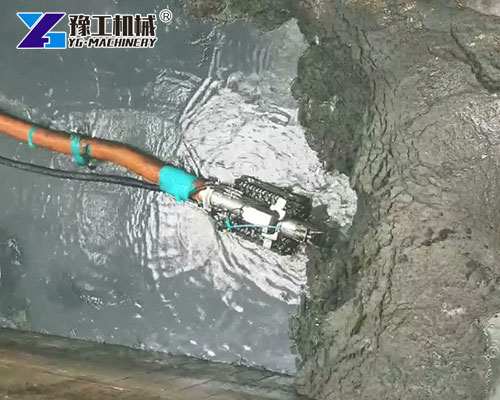
An underwater cleaning robot from YG Machinery was exported to an Australian dam cleaning project. The equipment has been shipped to the customer site and is now prepared for underwater sediment removal and maintenance work.
This case shows how a remotely controlled underwater system can replace manual diving and improve safety in complex water environments.
Project Background And Working Conditions of the Underwater Cleaning Robot
The customer is based in Australia and is responsible for dam and port maintenance. The main cleaning areas include sediment, debris, and long-term underwater deposits.
Working environment:
The dam’s bottom has uneven terrain
Mixed sediment and solid debris
Low visibility underwater conditions
Water depth changes across working zones
Main challenges:
Manual diving is expensive and unsafe
Traditional dredging equipment is not flexible enough
Cleaning areas are spread across large water zones
Frequent relocation increases operation cost
In this situation, the underwater cleaning robot is chosen to improve safety and flexibility in underwater maintenance tasks.
WhatsApp/WeChat/Phone: 86 138 3715 9132
Customer Selection Logic Of Underwater Cleaning Robot Was Based On Real Site Needs
The customer did not select the equipment immediately. Several solutions were compared before the final decision.
Initial options:
Traditional suction dredger
Manual diving cleaning team
Fixed dredging equipment system
Customer decision focus:
Ability to work without closing the dam or port area
Flexibility for shallow and deep water zones
Lower long-term maintenance cost
Safer alternative to human diving work
Final direction:
Move toward a remotely operated underwater cleaning solution
But required confirmation on depth, distance, and stability
Used for underwater pumping of sludge Pumpable particle diameter: 40mm (can be changed according to customer needs) Lift: 25 meters (horizontal conveying distance 100-150 meters)
1
Underwater hydraulic power source
Waterproof hydraulic system
1
Robot main control cabin (underwater)
Used to control all actions of the robot, including the start and stop of underwater hydraulics and the lighting system.
1
Underwater lighting system
2 LED lights
1
Underwater camera system
Equipped with 1 underwater camera
Optional
Cable winding system
Electric drive (or manual), speed 0-10 r/min
1
Underwater pipeline
50 meters
1
Ground electric control system
Main electric control cabinet
Used to power various ground systems.
1
Main control console
Robot ground main control system, used to control the work of underwater robots